Anuncio
La localización y el mapeo simultáneos (SLAM) probablemente no sean una frase que use todos los días. Sin embargo, varias de las últimas maravillas tecnológicas geniales utilizan este proceso cada milisegundo de su vida útil.
¿Qué es SLAM? ¿Por qué lo necesitamos? ¿Y de qué tecnologías geniales hablas?
Del acrónimo a la idea abstracta
Aquí hay un juego rápido para ti. ¿Cuál de estos no pertenece?
- Autos sin conductor
- Aplicaciones de realidad aumentada
- Vehículos aéreos y submarinos autónomos.
- Wearables de realidad mixta
- The Roomba
Puede pensar que la respuesta es fácilmente el último elemento de la lista. En cierto modo, tienes razón. De otra manera, este fue un juego de trucos ya que todos esos elementos están relacionados.

La verdadera pregunta del juego (muy bueno) es esta: ¿Qué hace factibles todas estas tecnologías? La respuesta: localización y mapeo simultáneos, ¡o SLAM! como dicen los chicos geniales.
En un sentido general, el propósito de los algoritmos SLAM es lo suficientemente fácil de iterar. Un robot utilizará localización y mapeo simultáneos para estimar su posición y orientación (o pose) en el espacio mientras crea un mapa de su entorno. Esto permite al robot identificar dónde está y cómo moverse a través de un espacio desconocido.
Por lo tanto, sí, es decir, todo lo que hace este algoritmo sofisticado es estimar la posición. Otra tecnología popular, Sistema de posicionamiento global (o GPS) ¿Cómo funciona el rastreo GPS y qué se puede rastrear con él?GPS. Lo conocemos como la tecnología que nos guía de A a B. Pero el GPS es más que eso. Existe un mundo de posibilidades, y no queremos que te lo pierdas. Lee mas ha estado estimando su posición desde la primera Guerra del Golfo de la década de 1990.
Diferenciando entre SLAM y GPS
Entonces, ¿por qué la necesidad de un nuevo algoritmo? El GPS tiene dos problemas inherentes. Primero, si bien el GPS es preciso en relación con una escala global, tanto la precisión como la precisión disminuyen la escala en relación con una habitación, una mesa o una pequeña intersección. El GPS tiene una precisión de hasta un metro, pero ¿qué centímetro? ¿Milímetro?
En segundo lugar, el GPS no funciona bien bajo el agua. Por no bien quiero decir en absoluto. Del mismo modo, el rendimiento es irregular dentro de los edificios con gruesos muros de hormigón. O en sótanos. Tienes la idea. El GPS es un sistema basado en satélites, que adolece de limitaciones físicas.
Por lo tanto, los algoritmos SLAM tienen como objetivo proporcionar una mejor sensación de posición para nuestros dispositivos y máquinas más avanzados.
Estos dispositivos ya tienen una letanía de sensores y periféricos. Los algoritmos SLAM utilizan los datos de tantos como sea posible mediante el uso de algunas matemáticas y estadísticas.
Pollo o huevo? ¿Posición o mapa?
Las matemáticas y las estadísticas son necesarias para responder a un dilema complejo: ¿se usa la posición para crear el mapa de los alrededores o se usa el mapa de los alrededores para calcular la posición?
Pensamiento tiempo de experimento! Estás deformado interdimensionalmente a un lugar desconocido. ¿Qué es lo primero que haces? ¿Pánico? Bien, cálmate, respira. Toma otro. Ahora, ¿qué es lo segundo que haces? Mire a su alrededor e intente encontrar algo familiar. Una silla está a tu izquierda. Una planta está a tu derecha. Una mesa de café está frente a ti.
A continuación, una vez que el miedo paralizante de "¿Dónde diablos estoy?" desaparece, comienzas a moverte. Espera, ¿cómo funciona el movimiento en esta dimensión? Da un paso adelante La silla y la planta se hacen más pequeñas y la mesa se hace más grande. Ahora, puede confirmar que, de hecho, está avanzando.
Las observaciones son clave para mejorar la precisión de la estimación SLAM. En el siguiente video, a medida que el robot se mueve de marcador en marcador, construye un mejor mapa del entorno.
Volviendo a la otra dimensión, cuanto más caminas, más te orientas. Pasar en todas las direcciones confirma que el movimiento en esta dimensión es similar a la dimensión de su hogar. A medida que avanza hacia la derecha, la planta se hace más grande. Con ayuda, ves otras cosas que identificas como puntos de referencia en este nuevo mundo que te permiten deambular con más confianza.
Este es esencialmente el proceso de SLAM.
Entradas al proceso
Para realizar estas estimaciones, los algoritmos utilizan varios datos que pueden clasificarse como internos o externos. Para su ejemplo de transporte interdimensional (admítalo, tuvo un viaje divertido), las medidas internas son el tamaño de los pasos y la dirección.
Las medidas externas realizadas son en forma de imágenes. Identificar puntos de referencia como la planta, la silla y la mesa es una tarea fácil para los ojos y el cerebro. El procesador más poderoso conocido, el cerebro humano, es capaz de tomar estas imágenes y no solo identificar objetos, sino también estimar la distancia a ese objeto.
Desafortunadamente (o afortunadamente, dependiendo de su miedo a SkyNet), los robots no tienen un cerebro humano como procesador. Las máquinas dependen de chips de silicio con código escrito humano como cerebro.
Otras piezas de maquinaria realizan mediciones externas. Los periféricos como los giroscopios u otras unidades de medición de inercia (IMU) son útiles para hacer esto. Los robots como los autos sin conductor también utilizan la odometría de la posición de las ruedas como medida interna.

Externamente, un automóvil autónomo y otros robots usan LIDAR. Similar a cómo el radar usa ondas de radio, LIDAR mide los pulsos de luz reflejada para identificar la distancia. La luz utilizada es típicamente ultravioleta o infrarrojo cercano, similar a un sensor de profundidad infrarroja.
LIDAR envía decenas de miles de pulsos por segundo para crear un mapa de nubes de puntos tridimensionales de muy alta definición. Entonces, sí, la próxima vez que Tesla ruede en piloto automático, te disparará con un láser. Muchas veces.
Además, los algoritmos SLAM utilizan imágenes estáticas y técnicas de visión por computadora como una medida externa. Esto se hace con una sola cámara, pero se puede hacer aún más preciso con un par estéreo.
Dentro de la caja negra
Las mediciones internas actualizarán la posición estimada, que se puede usar para actualizar el mapa externo. Las mediciones externas actualizarán el mapa estimado, que puede usarse para actualizar la posición. Puede pensarlo como un problema de inferencia, y la idea es encontrar la solución óptima.
Una forma común de hacer esto es a través de la probabilidad. Técnicas como la posición aproximada de un filtro de partículas y el mapeo utilizando la inferencia estadística bayesiana.
Un filtro de partículas utiliza un número establecido de partículas distribuidas por una distribución gaussiana. Cada partícula "predice" la posición actual del robot. Se asigna una probabilidad a cada partícula. Todas las partículas comienzan con la misma probabilidad.
Cuando se realizan mediciones que se confirman entre sí (como el paso adelante = la tabla se hace más grande), entonces las partículas que son "correctas" en su posición tienen mejores probabilidades de forma incremental. A las partículas que están muy alejadas se les asignan probabilidades más bajas.
Cuantos más puntos de referencia pueda identificar un robot, mejor. Los puntos de referencia brindan retroalimentación al algoritmo y permiten cálculos más precisos.
Aplicaciones actuales que utilizan algoritmos SLAM
Analicemos esto, genial tecnología por genial tecnología.
Vehículos autónomos subacuáticos (AUV)
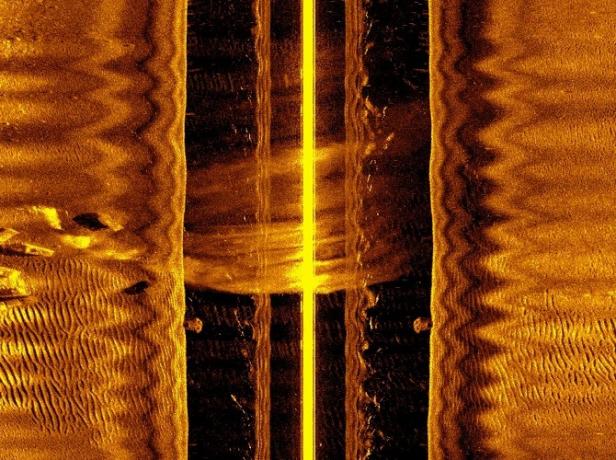
Los submarinos no tripulados pueden operar de forma autónoma utilizando técnicas SLAM. Una IMU interna proporciona datos de aceleración y movimiento en tres direcciones. Además, los AUV usan sonar orientado hacia abajo para estimar la profundidad. La sonda de exploración lateral crea imágenes del fondo del mar, con un alcance de unos cientos de metros.
Wearables de realidad mixta
Microsoft y Magic Leap han producido gafas portátiles que introducen Aplicaciones de realidad mixta Windows Mixed Reality: qué es y cómo probarlo ahoraWindows Mixed Reality es una nueva característica que le permite usar Windows 10 en realidad virtual y aumentada. He aquí por qué es emocionante y cómo averiguar si su PC lo admite. Lee mas . Estimar la posición y crear un mapa es crucial para estos wearables. Los dispositivos usan el mapa para colocar objetos virtuales encima de objetos reales y hacer que interactúen entre sí.
Dado que estos wearables son pequeños, no pueden usar periféricos grandes como LIDAR o sonar. En cambio, se utilizan sensores de profundidad infrarrojos más pequeños y cámaras orientadas hacia el exterior para mapear un entorno.
Autos sin conductor
Los autos autónomos tienen una pequeña ventaja sobre los wearables. Con un tamaño físico mucho mayor, los automóviles pueden contener computadoras más grandes y tener más periféricos para realizar mediciones internas y externas. En muchos sentidos, los automóviles autónomos representan el futuro de la tecnología, tanto en términos de software como de hardware.
La tecnología SLAM está mejorando
Con la tecnología SLAM utilizada de diferentes maneras, es solo cuestión de tiempo antes de que se perfeccione. Una vez que los automóviles autónomos (y otros vehículos) se vean a diario, sabrá que la localización y el mapeo simultáneos están listos para que todos los usen.
La tecnología de conducción autónoma está mejorando cada día. ¿Quiere saber más? Consulte el desglose detallado de MakeUseOf de cómo funcionan los autos sin conductor Cómo funcionan los automóviles autónomos: las tuercas y tornillos detrás del programa de automóviles autónomos de GooglePoder viajar de ida y vuelta al trabajo mientras duerme, come o se pone al día con su favorito blogs es un concepto igualmente atractivo y aparentemente lejano y demasiado futurista para realmente suceder. Lee mas . Usted también puede estar interesado en cómo los hackers están apuntando a los autos conectados.
Haber de imagen: chesky_w /Depositphotos
Tom es un ingeniero de software de Florida (agradecimiento al hombre de Florida) con una pasión por la escritura, el fútbol universitario (¡vaya Gators!), CrossFit y las comas de Oxford.

